Root finding & integration
←Previous
Numerical integration: Trapezoidal, Simpson and all that
Another problem often encountered in theoretical physics is the occurrence of
an integral that is difficult or impossible to evaluate in closed form, i.e.
analytically. A typical example for this is the period of the non-linear
pendulum, encountered in
Lecture 4.
Its equation of motion reads
\[ \frac{{\rm d}^2\theta}{{\rm d}t^2} \,=\, - \frac{g}{l}\sin\theta . \]
This can be translated into an equation for the period, namely
\[ T\,=\, \sqrt{\frac{8l}{g}} \,
\int\limits_0^{\theta_{\rm max}}\,
\frac{{\rm d}\theta}{\sqrt{\cos\theta\,-\,\cos\theta_{\rm max}}}\, , \]
where θmax is the maximal deflection, in the case
studied here equal to the initial deflection. This essentially is an elliptic
integral, which cannot be solved analytically, and numerical methods must be
applied. We will use it as the example in the following.
Simple Newton-Cotes method
The first class of methods we will employ go under the name of
Newton-Cotes methods. They essentially boil down to dividing the region of
integration in equally sized intervals:
If the integral of a function f(x) is to be taken in the interval
[a,b], then we may write
\[I_f^{a,b}\,=\,
\int\limits_a^b\,{\rm d} x\,f(x)\approx \sum_{i=0}^{N-1}\,f(x_i)\Delta x\,\,,\]
where &Delta x = (b-a)/N and xi = a+iΔx. To find
the error in this approximation we must apply some semi-obscure maths formulae,
starting with the
Euler-Maclaurin summation formula. It states that
\[ \sum_{i=1}^{N-1}\, F(i)\,=\,
\int\limits_0^N\,{\rm d}uF(u)-\frac{1}{2}[F(0)+F(N)]+
\sum_{k=1}^{\infty} \left\{ \frac{B_{2k}}{(2k)!}
\left[ F^{(2k-1)}(N)- F^{(2k-1)}(0) \right]
\right\}\, . \]
Here F(x) is a function that can be differentiated any number of times, and
F(k) is the k-th derivative of this function.
The constants B2k are the
Bernoulli numbers.
Here it should suffice to state that B2=1/6 and
B4=-1/30
.
In order to make the summation formula any use, we need to convert it from the
i
and u arguments in the function to x space. This can be achieved by
the transformation
\[ x\,=\,u\Delta x+ a\, . \]
With this transformation, the values of u=i can be directly read off: they
are just the xi. Therefore, the Euler-Maclaurin formula
(for F=f) becomes
\[ \sum_{i=1}^{N-1}f(x_i)\,=\,
\frac{1}{\Delta x}\int\limits_a^b{\rm d}xf(x)-\frac{1}{2}[f(a)+f(b)]+
\sum_{k=1}^\infty \left\{
\frac{B_{2k}}{(2k)!} \left[f^{(2k-1)}(b)-f^{(2k-1)}(a) \right]\,
(\Delta x)^{2k-1} \right\} \,\, . \]
Rearranging and adjusting the summation index on the cost of some extra signs
yields the error estimate of the Newton-Cotes method:
\[ \int\limits_a^b{\rm d} x\,f(x)\,=\,
\sum_{i=0}^{N-1} f(x_i) \Delta x + \frac{\Delta x}{2} [f(b)-f(a)]-
\frac{(\Delta x)^2}{12} [f'(b)-f'(a)] + {\cal O}[(\Delta x)^4] \, . \]
We see that the Newton-Cotes method has an error of the order Δx,
similar to the Euler method for solving differential equations. This, of course,
can be addressed by minimizing Δx, but this is not very cost
effective.
Trapezoidal method
Fortunately, in this case, the error estimate lends itself to an improvement
of the situation. Just adding the second term to the integral estimate,
i.e. taking
\[ \int\limits_a^b{\rm d}x\,f(x)\,=\,
\sum_{i=0}^{N-1}f(x_i)\Delta x + \frac{\Delta x}{2} [f(b) - f(a)]\,=\,
\sum_{i=1}^{N-1}f(x_i)\Delta x + \frac{\Delta x}{2} [f(a) + f(b)] \]
immediately reduces the error to the order (Δx)².
A closer inspection reveals that the trapezoidal method sums over
panels with the forms of trapezes, each with an area of
Δx[f(xi+1)+f(xi)]/2. In the original
Newton-Cotes method rectangular panels were used, with the area
given by Δxf(xi), employing only the left edge of the
rectangles. As already indicated, the trapezoidal method has an error of the
order of (Δx)², analogous to the second-order Runge-Kutta method
for solving differential equations.
Simpson's method
This can be further improved by the methods which use higher-order curves
rather than simple zeroth or first order rectangular or trapezoidal panels. A
prime example is Simpson's method, which employs parabolae, i.e. curves of
second order, that are obtained by fitting parabolic curves through the three top
corners of two neighbouring panels. Fitting e.g. the two panels
Ai (between xi and xi+1) and
Ai+1 (between xi+1 and
xi+2) with the same parabola of the form ax²+bx+c,
the area of the two panels reads
\[\begin{eqnarray*}
A_i+A_{i+1}\, &=&\, \int\limits_{x_i}^{x_{i+2}}{\rm d}x(ax^2+bx + c)\,=
\, \frac{a}{3} (x_{i+2}^3\,-\,x_i^3 )+\frac{b}{2} (x_{i+2}^2-x_i^2 )+
c(x_{i+2}-x_i)
\\
&=&\, \frac{a}{3}(x_{i+2}-x_i)(x_{i+2}^2+x_{i+2}x_i+x_i^2)
+ \frac{b}{2}(x_{i+2}-x_i)(x_{i+2}+x_i) + c(x_{i+2}-x_i)
\\
&=&\, \frac{\Delta x}{3} \left[ a(x_{i+2}^2 + 4x_{i+1}^2 + x_i^2) +
b(x_{i+2} + 4x_{i+1}\,+\,x_i) + 6c \right]
\\
&=&\, \frac{\Delta x}{3} [f(x_{i+2}) + 4f(x_{i+1}) + f(x_i)]\, .
\end{eqnarray*} \]
Here, the identities
\[ x_{i+1} \,=\, \frac{x_{i+2} + x_i}{2} \,\,\, \mathrm{and} \,\,\,
\Delta x\,=\, x_{i+2} - x_{i+1}\,=\, x_{i+1}- x_i \]
have been used. Therefore, Simpson's rule for the entire integral reads
\[ \int\limits_a^b {\rm d}xf(x) \approx
\frac{\Delta x}{3}[f(a) + 4f(x_1) + 2f(x_2) + 4f(x_3) + 2f(x_4) +
\dots + 2f(x_{N-2})\,+\,4f(x_{N-1}) +f(b)] \]
and N is an even number. Here the error is of order
(&Delta x)4, similar to the fourth-order
Runge-Kutta method.
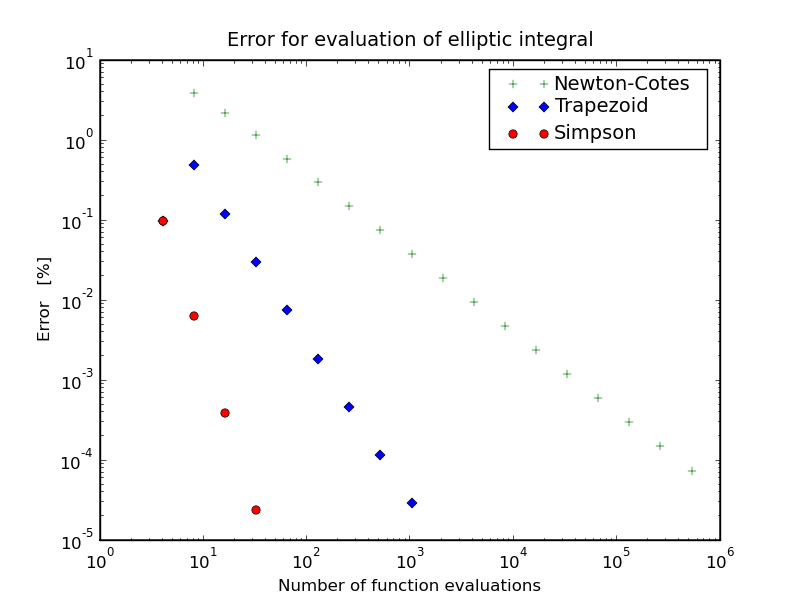
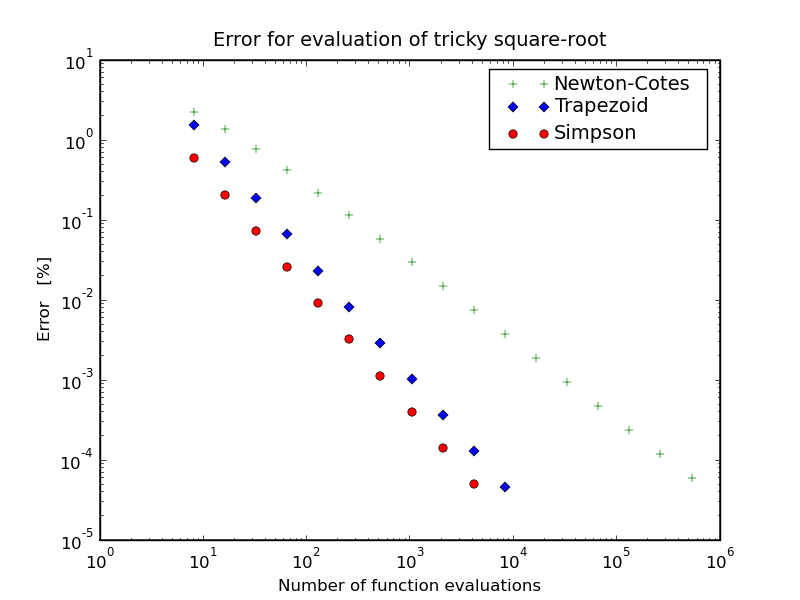
In the table below you'll find some example results for the following two
integrals:
\[ \begin{eqnarray*}
I_1\,&=&\,\int\limits_0^{\pi/2}{\rm d}\theta\,\sqrt{1 - k^2 \sin^2 \theta}
\\
I_2\,&=&\,\int\limits_0^2{\rm d}x\, \sqrt{4-x^2} \, .
\end{eqnarray*} \]
While the first integral, depicted to the left, converges extremely fast for
Simpson's method, the behaviour of the second integral is not as nice. This is
mainly due to the fact that the derivative diverges at the right edge.
Next→
Frank Krauss and Daniel Maitre
Last modified: Tue Oct 3 14:43:58 BST 2017