In contrast to the lectures before, this lecture will centre around technical rather than physical problems, namely the solution of equations of the type
for x, and the evaluation of integrals,
both potentially also in more than one dimension.
This lecture follows the discussion in Giordano & Nakanishi, appendices B, section 1, and E, sections 1, 2, and 4.
We first address the issue of finding the roots of the equation f(x)=0. We notice that this may help to find extremal values of an equation g(x), if dg(x)/dx = f(x), a typical optimisation problem. Let us first consider a case where we also know the first derivative of f, f'. In this case the method of choice is the Newton-Raphson method. It is an iterative method, based on truncating the Taylor series of f(x) after the first term. Let the unknown true root be X, which is estimated by xi. Defining Δxi = xi-X and Taylor expanding f(X) around xi, we have
leading to an improved estimate
This is a better estimate of X if Δxi is small enough. Although this approximation stems from a first-order truncation, the errors Δxi may decrease very rapidly if the function does not fluctuate to wildly. To see this, rewrite the equation above as
Re-expanding this in a Taylor series then yields the following result:
In other words: The size of the error decreases quadratically with each iteration step. Therefore, the order of convergence of this method is 2. If f(x) is sufficiently smooth or if the initial estimate, x0, is close enough to X, the convergence will be fast, but there are cases where this method does not converge at all.
How can this be used in cases where no information concerning the first derivative is available? The answer is to use the function itself to obtain an estimate for the derivative. Recalling that the derivative is defined through the limit
it is clear that it can be estimated through
Substituting this estimate into the expression for xi+1 yields
The error estimate is now given by
Interestingly, the order of convergence in this case equals the golden mean,
(1+√5)/2, roughly 1.6. This method, sometimes also known as the
secant method has all the shortcomings of the original Newton-Raphson
method, and in addition two initial guesses are necessary.
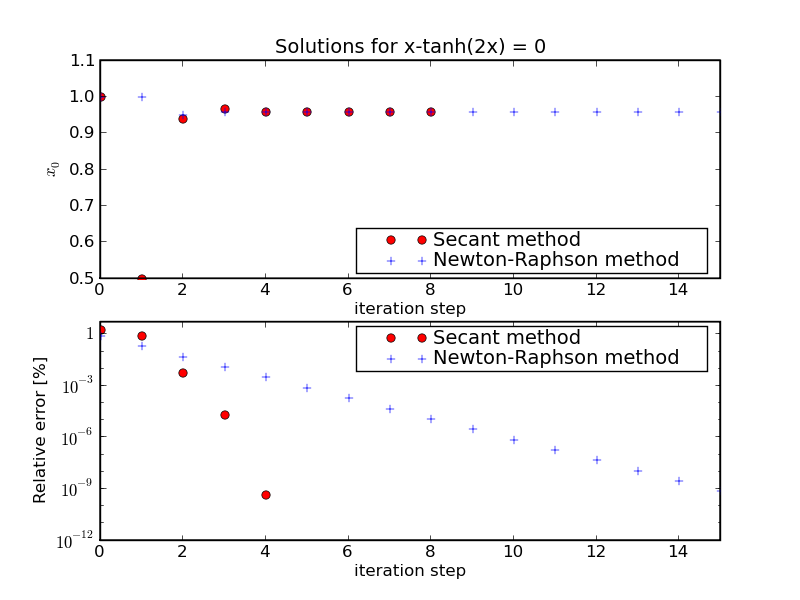
In order to see the differences of the two methods, let us exemplify them
by solving the equation
which we will meet again in lecture 8. Here, a is an essentially free parameter: For a≥1, this equation has two non-trivial solutions, at x=±X, while for a≤1 there is only one solution at x=0. Below we see the results for a = 2 obtained from both methods:
Playing with this code it becomes apparent that the level of convergence, and
the result depend on the initial values: Choosing, for instance, a different
initial value of x0= 0.5 for the Newton-Raphson method yields
the trivial solution x=0.
It is worth noting here that a condition to stop the recursion is given by